Jambes humanoïdes imprimables en 3D permettant aux expériences de robotique de se déchaîner
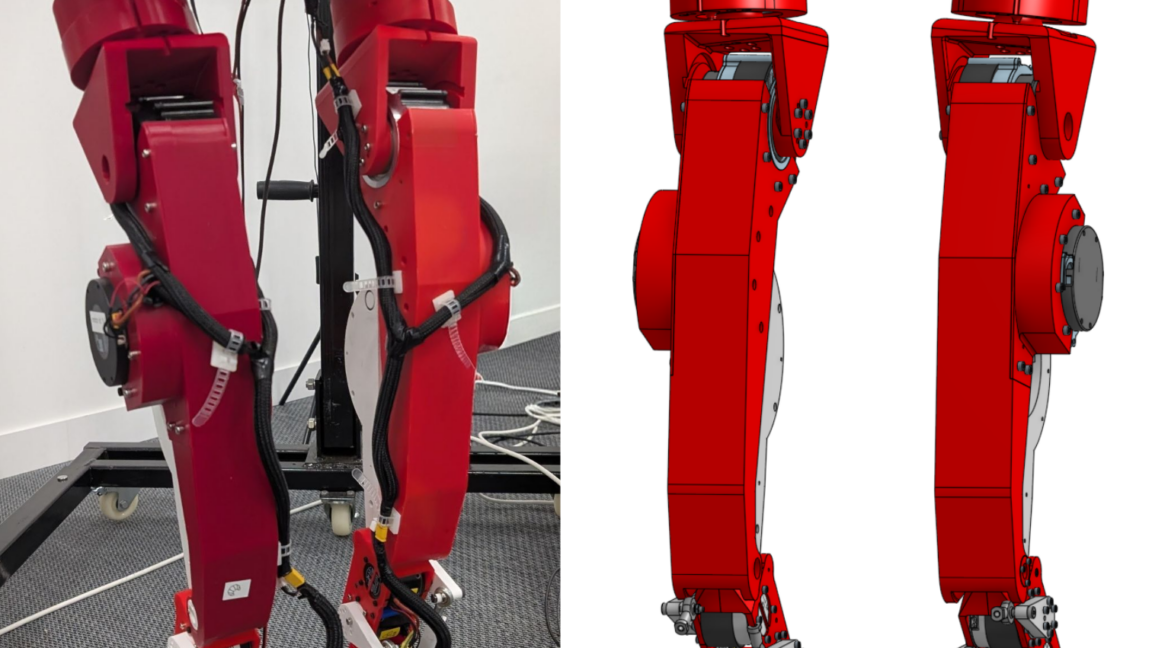
Des chercheurs de l’Université de Californie à Berkeley ont développé une paire de jambes humanoïdes imprimables en 3D et peu coûteuses appelée Berkeley Humanoid Legs. Conçue pour aider les scientifiques qui étudient l’intelligence artificielle et le contrôle de la locomotion, la plateforme open-source permet aux chercheurs d’expérimenter avec la marche et d’autres mouvements dynamiques pour un dixième du coût des alternatives commerciales.
Les robots humanoïdes coûtent généralement de 20 000 à 600 000 dollars, ce qui les rend inaccessibles pour la plupart des chercheurs universitaires. En réponse, l’équipe de Berkeley a créé un design qui peut être construit pour environ 3 000 dollars en utilisant des pièces imprimées en 3D et des composants disponibles dans le commerce.
Les jambes mesurent environ 1,3 mètre de haut et pèsent 15 kilogrammes. Elles comportent 12 degrés de liberté actionnés par 12 moteurs électriques personnalisés, permettant des mouvements complexes semblables à ceux des humains. Chaque jambe possède six articulations contrôlées par ordinateur, une au niveau de la hanche pour la rotation, deux au niveau de la hanche pour le mouvement avant-arrière et latéral, une au niveau du genou et deux au niveau de la cheville.
Les concepteurs ont équipé les jambes de capteurs de force et de position pour aider le robot à comprendre sa position et comment ses pieds interagissent avec le sol. Cette rétroaction sensorielle est cruciale pour maintenir l’équilibre pendant la marche. L’équipe a également développé une ceinture de sécurité qui permet au robot d’expérimenter de nouveaux mouvements sans risquer de tomber et de se casser.
Dans des tests, les Berkeley Humanoid Legs ont démontré plusieurs capacités de marche impressionnantes. Le robot peut marcher en avant à 1,6 mètre par seconde, marcher en arrière à 0,45 mètre par seconde et se déplacer latéralement à 0,45 mètre par seconde. Il peut également tourner sur place à 1,4 radian par seconde. Ces performances correspondent aux capacités de marche des plateformes humanoïdes commerciales coûtant dix fois plus cher.
La conception open-source inclut des fichiers d’impression 3D, une liste de matériaux nécessaires et du code de contrôle. Les chercheurs peuvent télécharger ces ressources gratuitement et construire leurs propres jambes robotiques en utilisant des imprimantes 3D standard. Cette approche démocratise l’accès à la technologie robotique avancée et accélère la recherche en permettant à davantage d’équipes de contribuer aux progrès de la locomotion humanoïde et du contrôle par IA.
Le projet fait partie d’une tendance croissante dans la robotique visant à rendre la technologie avancée plus accessible. En baissant les barrières financières, les chercheurs espèrent accélérer les progrès dans la compréhension de la façon dont les robots peuvent se déplacer de manière plus naturelle et s’adapter à différents environnements, des terrains accidentés aux escaliers.
Les Berkeley Humanoid Legs représentent une avancée significative pour les chercheurs étudiant la marche bipède et le contrôle robotique. L’équipe prévoit de continuer à améliorer la conception et encourage les collaborations qui pourraient conduire à de nouvelles percées en matière de mobilité robotique.




