Regardez un essaim de robots fleurir comme un jardin
Des chercheurs de l’Université de Princeton ont construit un essaim de mini-robots interconnectés qui fleurissent comme des fleurs en réponse aux changements de niveaux de lumière dans un bureau. Selon leur nouvel article publié dans la revue Science Robotics, de tels essaims robotiques pourraient un jour être utilisés comme façades dynamiques dans les conceptions architecturales, permettant aux bâtiments de s’adapter aux conditions climatiques changeantes ainsi que d’interagir avec les humains de manière créative.
Les auteurs se sont inspirés des architectures vivantes, comme les ruches. Les fourmis de feu fournissent un exemple classique de ce type de comportement collectif. Quelques fourmis bien espacées se comportent comme des fourmis individuelles. Mais si on en rassemble suffisamment, elles se comportent davantage comme une seule unité, présentant à la fois des propriétés solides et liquides. Vous pouvez les verser d’une théière comme des fourmis, comme le laboratoire de Goldman l’a démontré il y a plusieurs années, ou elles peuvent se lier pour construire des tours ou des radeaux flottants, une compétence de survie pratique lorsque, par exemple, un ouragan inonde Houston. Elles excellent également dans la régulation de leur propre flux de circulation. On ne voit presque jamais un embouteillage de fourmis.
Naturellement, les scientifiques sont impatients d’imiter de tels systèmes. Par exemple, en 2018, des chercheurs du Georgia Tech ont construit des robots semblables à des fourmis et les ont programmés pour creuser à travers des balles en plastique magnétique imprimées en 3D conçues pour simuler un sol humide. Des essaims de robots capables de creuser efficacement sous terre sans se bloquer seraient extrêmement bénéfiques pour les efforts miniers ou de récupération après catastrophe, où l’utilisation d’êtres humains pourrait ne pas être réalisable.
En 2019, des scientifiques ont découvert que les volées de choucas sauvages changent leurs schémas de vol selon qu’ils retournent se percher ou se regroupent pour chasser les prédateurs. Ce travail pourrait un jour mener au développement d’essaims robotiques autonomes capables de changer leurs règles d’interaction pour effectuer différentes tâches en réponse à des signaux environnementaux.
Les auteurs de ce dernier article notent que les plantes peuvent optimiser leur forme pour obtenir suffisamment de lumière solaire ou de nutriments, grâce à des cellules individuelles qui interagissent entre elles via des signaux mécaniques et d’autres formes de signalisation. En revanche, l’architecture conçue par les êtres humains est largement statique, composée d’éléments fixes rigides qui entravent la capacité des occupants des bâtiments à s’adapter aux variations quotidiennes, saisonnières ou annuelles des conditions climatiques. Il n’y a eu que quelques exemples d’application d’algorithmes d’intelligence collective inspirés par les plantes, les insectes et les oiseaux migrateurs au processus de conception pour obtenir des conceptions structurelles plus créatives ou une meilleure optimisation énergétique.
Les auteurs étaient intéressés par l’exploration de façades adaptatives et dynamiques en architecture, inspirés par les tentatives passées d’intégrer des éléments biologiques pour créer des bâtiments vivants : utiliser des panneaux d’algues pour générer de l’énergie et fournir de l’ombre, par exemple. La plupart de ces efforts reposent sur des réseaux de modules mécaniques rigides pour répondre aux stimuli externes, comme les Tours Al Bahr à Abu Dhabi. Plus récemment, les architectes ont exploré des réseaux de modules souples pour les façades, tels que des poutres et coques bimétalliques qui répondent aux changements de température pour contrôler la ventilation et la température du bâtiment.
Construction d’un jardin d’essaim
Merihan Alhafnawi, ingénieure en mécanique à Princeton, et ses co-auteurs se sont tournés vers la robotique en essaim pour concevoir leur projet de validation de concept, baptisé Swarm Garden. Ils ont construit un réseau de 40 unités robotiques modulaires et réarrangeables qu’ils ont appelées SGbots, connectées via un réseau Wi-Fi pour permettre un protocole de communication partagé conçu pour faciliter la prise de décision collective.
Chaque robot possède un capteur de lumière ambiante orienté vers l’arrière pour détecter les changements d’éclairage et un capteur de proximité orienté vers l’avant pour lui permettre de trouver et de communiquer avec ses voisins les plus proches. Et chaque robot dispose d’un actionneur conçu pour rétracter ou étendre une fine feuille de plastique à travers une mince fente ; les feuilles peuvent se plier ou s’ouvrir en une floraison en réponse aux stimuli environnementaux.
Alhafnawi et ses collègues ont conçu deux études de cas pour démontrer le potentiel de leur Swarm Garden. Dans la première, ils ont utilisé un Swarm Garden pour un ombrage adaptatif, plaçant 16 SGbots sur une fenêtre de bureau et les laissant fonctionner en continu pendant trois jours. Les robots ont complètement étendu leurs feuilles pour bloquer la lumière du soleil lorsque la lumière était particulièrement forte, se pliant progressivement à mesure que le soleil s’affaiblissait et que la pièce devenait plus sombre. Des simulations supplémentaires ont montré que le réseau fonctionnait également bien lorsqu’il était placé horizontalement dans des espaces d’atrium.
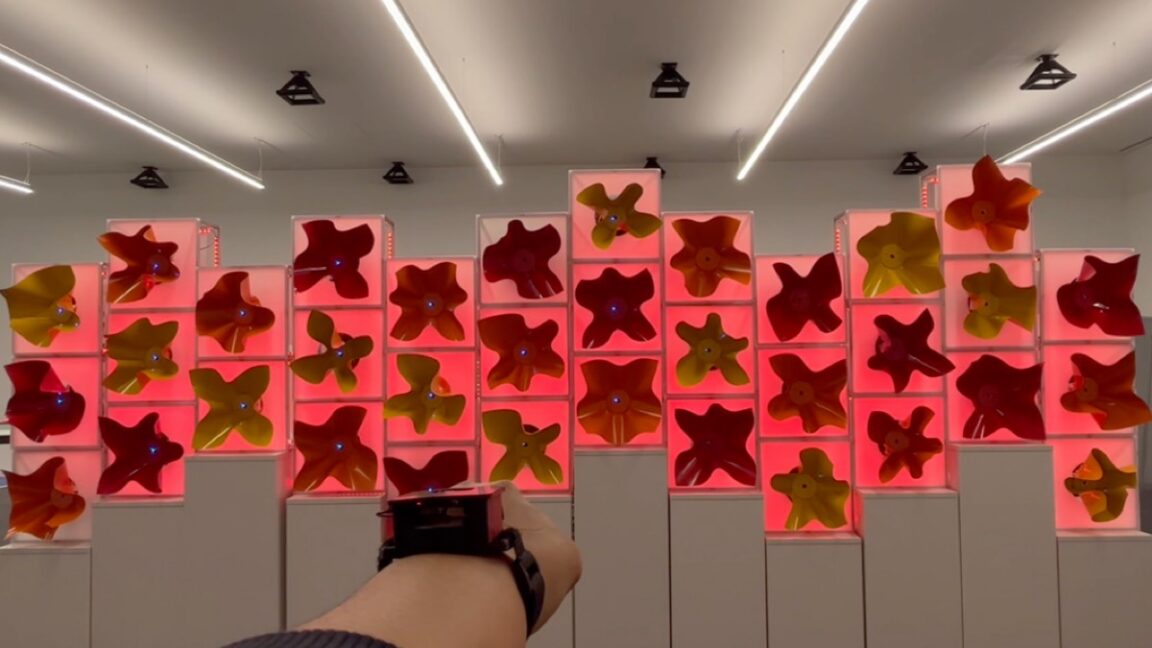
La deuxième étude de cas a été conçue pour mettre en valeur le potentiel des robots en essaim pour la conception d’intérieur créative. Cela impliquait un réseau de 36 SGbots lors d’une exposition publique en avril 2024 au Lewis Center for the Arts de Princeton. Dans une démonstration, les utilisateurs pouvaient faire fleurir et rétracter les robots en utilisant de simples gestes de la main. Dans une autre, les utilisateurs portaient des dispositifs portables afin qu’ils puissent induire des changements de couleur LED avec des mouvements gestuels du bras. L’un des co-auteurs a même exécuté une danse en direct équipé d’un dispositif portable à mi-chemin de l’exposition de trois heures.
La prochaine étape consiste pour l’équipe à collaborer avec des architectes pour déterminer la faisabilité du déploiement réel des réseaux Swarm Garden. Les auteurs veulent également explorer des matériaux plus durables et résistants car il y a un stress considérable sur les feuilles de plastique lors du processus de pliage à la floraison. Et ils suggèrent que l’emploi de coupes inspirées du kirigami pourrait réduire la puissance d’actionnement.
Nous envisageons un avenir où l’environnement bâti s’inspire de plus en plus des architectures vivantes, créant des façades qui s’adaptent constamment à leur environnement et à leurs occupants, ont conclu Alhafnawi et ses collègues. Le Swarm Garden offre un aperçu de cet avenir : un essaim architectural qui répond collectivement à la lumière du soleil et à l’interaction humaine. Il façonne davantage les espaces des occupants en étant animé de mouvement, vibrant de couleurs et beau en apparence, inspirant la créativité et l’expression.